Odisea resumida pero con sucios detalles para conducción adaptada con joystick.
Autor: José OlinPublicado: 2022-02-10

"Nunca podrá caminar", fue el diagnóstico tajante cuando tenía tres años. Durante la primera parte de mi vida, más que como un diagnóstico lo tomé como una orden, desear lo contrario era inmaduro. Si bien la Atrofia Muscular Espinal sigue progresando y sigo sin poder caminar, tengo la certeza de que podré conducir. Esta es la historia de la odisea para poner Low Rider en el estéreo mientras conducía, a pesar de no poder levantarme de la cama sin asistencia.
Todo empezó en unas vacaciones de verano. No conozco los detalles, sólo recuerdo que cuando llegué a casa el Ford Tempo guinda de mi tía Carmelita estaba en la cochera. Mis padres me dijeron que me lo había regalado. Lo sé, el mejor regalo de la historia.
Mi padre me llevó a mi primer clase de manejo. En aquel momento aún tenía suficiente fuerza para girar el volante, aunque con dificultades. ¿Para los pedales? Una tabla o un palo de escoba, no recuerdo qué era.
no era la forma en la que me veían por usar silla de ruedas, que me molestaba mucho durante la infancia, era una mirada diferente, como de asombro; fue maravilloso.
Salir de casa no fue problema, pues la entrada del pórtico tenía una pendiente pronunciada, por lo que el carro salió solo. Fuimos a dar una vuelta por la colonia, en las periferias de la ciudad. En algún momento del paseo una niña de la escuela me vio manejar, y se quedó mirándome; no era la forma en la que me veían por usar silla de ruedas, que me molestaba mucho durante la infancia, era una mirada diferente, como de asombro; fue maravilloso.
Entonces llegamos a casa. La pendiente, que a la salida me había facilitado la maniobra ahora me jugaba en contra, porque para entrar debías acelerar y casi inmediatamente frenar para evitar chocar con la pared, en menos de un metro... con un palo... ¡con un puto palo de escoba! ¿Necesitas el resto de la historia? Nadie salió lastimado, pero el leve choque fue suficiente para que mi padre decidiera que no era prudente volverlo a intentar.
colaborar con gente que no se rinda rápido y que elegir las herramientas adecuadas es muy importante
Aquella experiencia me dejó dos aprendizajes, colaborar con gente que no se rinda rápido y que elegir las herramientas adecuadas es muy importante. Un palo de escoba no era la herramienta adecuada y mi padre se rinde ridículamente rápido. Entendido.
[...] tal vez los más dañinos, eran en el orden de que era ridículo intentar algo que en aquel momento me parecía imposible.
Aquello fue a los 12 años. A partir de entonces, cuando nos proponían hacer algún proyecto final en la escuela, casi de inmediato pensaba en un sistema para poder conducir, aunque en aquel momento lo consideraba más como una fantasía, y no tomaba pasos reales para lograrlo; lo descartaba con pretextos varios, algunos reales como que el desarrollo sería caro y mi familia, con seis hijos, batallaba para llegar al fin de la quincena, pero otros, tal vez los más dañinos, eran en el orden de que era ridículo intentar algo que en aquel momento me parecía imposible.
si alguien entraba minimizaba la ventana, como si estuviera buscando porno
Hablar de discapacidad abiertamente me llevó alrededor de 25 años. Las primeras veces que consideré la posibilidad de una vida autónoma, vi que la tecnología podía ser la clave. Empecé a investigar las opciones disponibles, pero hacía las búsquedas de sillas de ruedas motorizadas o carros adaptados cuando estaba a solas, y si alguien entraba minimizaba la ventana, como si estuviera buscando porno. Ahora me resulta simpático, pero el proceso de aceptación ha sido largo.
Cuando me determiné a manejar fue porque quería invitar a salir a una chica y asumía que para invitar a salir debes poder pasar a su casa, es como una regla no escrita para mí. Así que busqué un trabajo de freelance para tener un ingreso y poder cubrir el desarrollo. La idea original era hacerlo en algo así como dos meses, antes de que terminara el semestre (XD lo sé).
No estuve ni cerca de lograrlo, pero la semilla estaba sembrada; a partir de aquel momento empecé a considerar seriamente, y no como una fantasía, dedicarme a proyectos para lograr una vida autónoma a través de la tecnología.
Al empezar a estudiar la maestría se cumplieron varias condiciones para trabajar en estos proyectos. La primera fue que mi confianza estaba en un nivel especialmente sano, pues nuestro proyecto de residencias de controlar un brazo robótico con Visión Artificial se había completado satisfactoriamente, a pesar de que era un área completamente nueva para Gabriel Rodriguez (Gabo), mi amigo, compañero de residencias y ahora colega, y para mí. Con todo y eso, dedicándole nuestras tardes y estudiando aún en los periodos vacacionales, logramos el objetivo; los resultados nos sorprendieron a nosotros mismos.
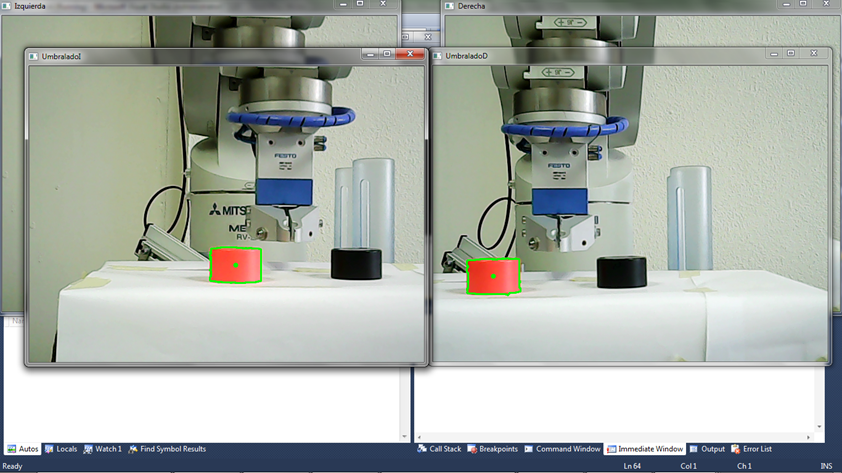
El otro factor determinante fue la confianza que tenía con nuestros asesores, los doctores Saúl Martínez Díaz y Alejandro Barranco,
 sin los cuales habría sido imposible completar el proyecto; el cumplimiento de los objetivos en un plazo relativamente corto tuvo muchísimo que ver con tener mentores que eran expertos en el área y que mostraban total disponibilidad para nuestras dudas. Al final del año de estar trabajando hombro a hombro,tuve la confianza de platicarles que, aunque la Visión Artificial me interesaba mucho, quería dedicarme a proyectos relacionados a la accesibilidad.
sin los cuales habría sido imposible completar el proyecto; el cumplimiento de los objetivos en un plazo relativamente corto tuvo muchísimo que ver con tener mentores que eran expertos en el área y que mostraban total disponibilidad para nuestras dudas. Al final del año de estar trabajando hombro a hombro,tuve la confianza de platicarles que, aunque la Visión Artificial me interesaba mucho, quería dedicarme a proyectos relacionados a la accesibilidad.
Mi proyecto preferido era el Isiukak, sin embargo los problemas asociados eran más mecánicos que electrónicos (o así lo creía); y aunque el desarrollo del software parecía un problema grande, no era claro cuál podría ser el aporte a nivel de sistemas computacionales del proyecto, por lo que el Isiukak se puso en pausa, para favorecer un tema más enfocado a sistemas digitales. Ahí nació el exoesqueleto Olin, un dispositivo para desplazarte de pie en interiores del que platicaré de forma extensa en otro post.
Dos años después, al terminar la maestría, aunque tenía una tesis en electrónica reconfigurable terminada y un prototipo construido, no sentí que el impacto en mi independencia fuera sustancial, por lo que decidí empezar a priorizar los proyectos por el impacto directo a la autonomía de las personas. Empezaría a trabajar en un sistema para poder conducir.
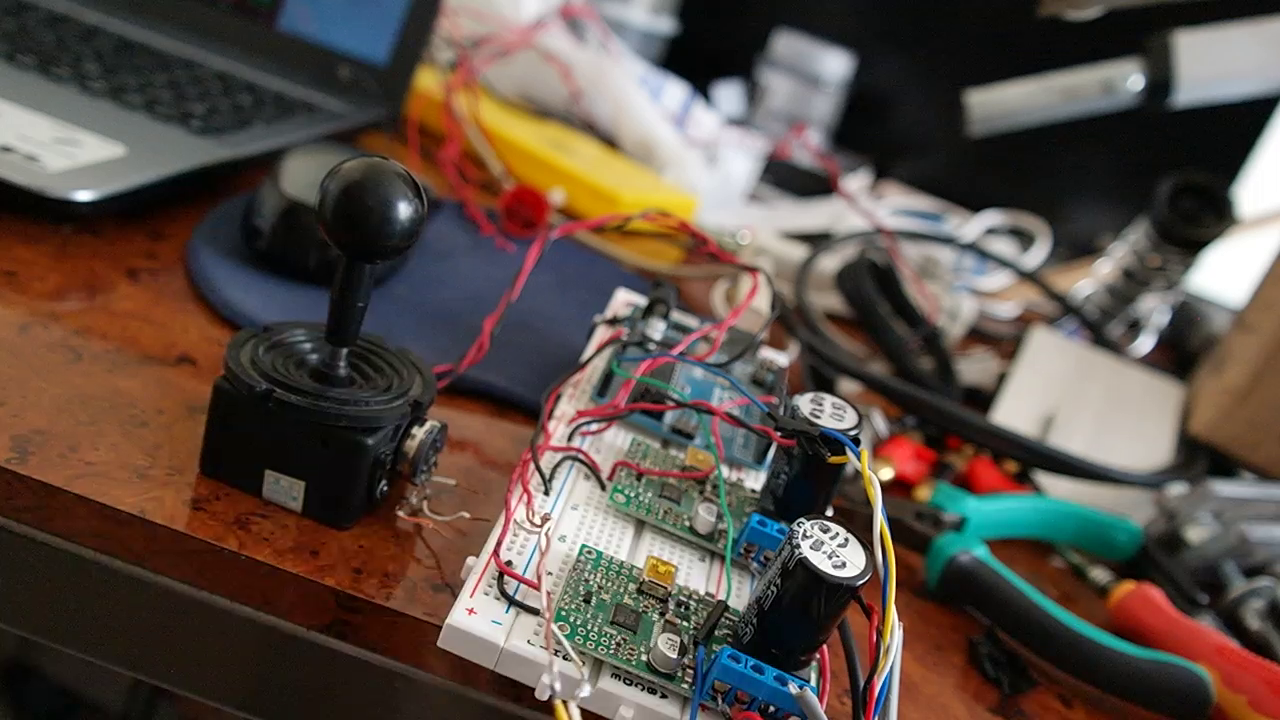
Compré los actuadores y la electrónica para un primer prototipo que moviera los pedales y en el verano de 2017 tuve todo integrado en la primer versión de control de los pedales con joystick.

También tuve la primer muestra de que el proyecto tenía más retos de los que aparentaba. Por alguna razón los actuadores vibraban fuertemente, aun si no se tocaba el joystick; habría sido imposible controlar los pedales así. Resultó que los potenciómetros con los que medíamos la posición de los motores son muy ruidosos, lo que hacía que el sistema de control oscilara de forma muy marcada. Se requirió implementar un filtro digital para limpiar la señal, lo que estabilizó el comportamiento.
En cuanto los pedales se comportaron de forma estable, procuré una prueba en campo. Publiqué un video un youtube con el progreso hasta el momento y Tony Marizcal, recién egresado de la Maestría en Sistemas, se interesó en el proyecto y empezó una amistad de intereses compartidos y construcción de circuitos.
Durante la primer prueba de la historia del Isiukak quedó claro que iba a requerir asistencia para mover el volante, la Atrofia Muscular Espinal es una condición progresiva, a los 12 años apenas podía mover el volante, a los 33 ya no podía hacerlo; así que Tony controló el volante, mientras yo aceleraba y frenaba con el joystick.
Completamos el viaje sin contratiempos y por supuesto que festejamos.

Cuando empecé a trabajar como profesor el desarrollo entró en otra meseta. Así que unas semanas antes de que iniciaran las vacaciones me autoimpuse un reto y una fecha límite. Si no completaba aquel objetivo definí un castigo tal por cumplir a como diera lugar con la fecha límite no hice algunas pruebas de seguridad y el sistema no detectaba la desconexión de algunos componentes; resultado: la prueba más riesgosa que hemos hecho y un carro desvielado cuya reparación se llevó mis aguinaldos.
[...] una cosa es hacer un programa que va a funcionar en un escritorio o en un dispositivo portátil y otra muy distinta hacer un programa que controlará un automóvil.
A pesar de todo, con cada prueba el sistema mejoraba, tanto el circuito como el código y nuestra comprensión de los retos del entorno automotriz; una cosa es hacer un programa que va a funcionar en un escritorio o en un dispositivo portátil y otra muy distinta hacer un programa que controlará un automóvil.
En 2017 la camioneta empezó a fallar. Una camioneta poco confiable implica fallar en compromisos si decidía no encender. Así que mi madre reunió sus ahorros y adquirimos una camioneta Toyota adaptada por la compañía Braun, que ya tenía muchas adaptaciones necesarias, como una rampa plegable que se almacena en el piso del coche, y el propio piso del coche más bajo, para que entrar con la silla no sea problemático; en esa camioneta podía quitar el asiento del conductor y colocarme con la silla; mis piernas pasaban por debajo del volante, algo que no era posible en una van regular.
La camioneta tenía casi todas las adaptaciones, excepto para conducir. Sin embargo ahora las pruebas que antes nos llevaban un día completo ahora podían hacerse en minutos, pues quitar el asiento del conductor era mucho más rápido.
Con la nueva camioneta y el apoyo de Octavio Geraldo, que fue mi estudiante en Electromecánica, hicimos algunas modificaciones al circuito del Isiukak, para facilitar el proceso de instalación. También en ese periodo, con la ayuda de Nasario del Taller el Morras, instalamos un sistema de cadena y piñones para mover el volante con un motor.
En 2019 pude conducir controlando pedales y dirección con el sistema Isiukak, sólo requerí ayuda para mover la palanca de cambios, pero no pude resistirme y esa vez sí que puse Low Rider.
Aquella vez después de probar el sistema en las afueras de la ciudad subimos al pedregal, una colonia con calles de gran pendiente, como un acto simbólico (y porque ahí vivía Octavio), y por supuesto que festejamos.

El módulo de control del Isiukak ha pasado de ser un prototipo en mi escritorio
a estar en un circuito con terminales que permitieran conectar y desconectar los componentes de forma sencilla.
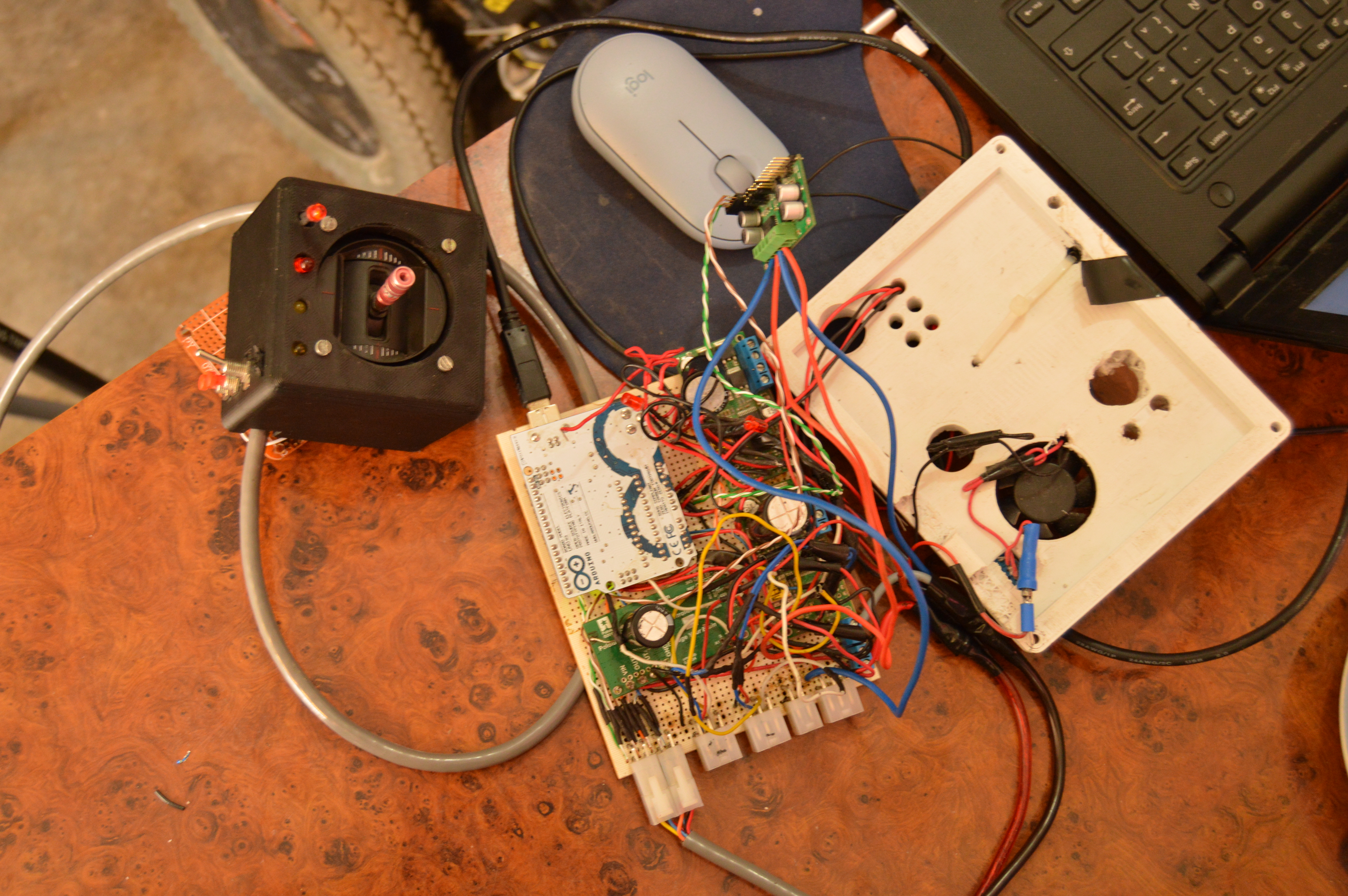
A verse así en marzo de 2021, cuando se integró al equipo Brayam Paul,

.jpg)
Actualmente podemos controlar pedales de acelerador y freno, asistir en el movimiento del volante y la palanca de cambios, y detectar desconexión del joystick, el freno o el acelerador, y en septiembre de 2021 hicimos el primer viaje de la Olincueva a casa sin asistencia, y por supuesto que festejamos.

Pasar de un prototipo a un dispositivo que pueda usarse cotidianamente ha sido un reto mucho mayor que un proyecto de verano. Ahora el objetivo es hacer un dispositivo lo más cercano posible al grado automotriz que pueda utilizarse todos los días; para ello es necesario comprar componentes de grado automotriz, y mejorar la robustez del sistema. Además, uno de mis sueños con Olin Robotics es que los colaboradores puedan tener ingresos competitivos, tal que crear soluciones pueda ser nuestro trabajo de tiempo completo.
tener autonomía para hacer una cita sin necesidad de que alguien más te lleve, de salir a comer, de ir al cine o a la base de Olin Robotics, o sencillamente dar un paseo de relajación, lo vale

Han sido decenas, tal vez cientos de horas en el taller, ajustando el soporte para los motores, instalando el sistema de piñones para mover el volante (3 versiones y media docena de ajustes), probando diferentes posiciones y ángulos para los motores, etc. Otras cientos de horas codificando y construyendo los circuitos. Aunque tenemos un estimado del costo de los componentes necesarios, no llevé un registro del costo asociado a la construcción de piezas o las horas de diseño y programación, sin embargo, sabemos que lo vale, que tener autonomía para hacer una cita sin necesidad de que alguien más me lleve, de salir a comer, de ir al cine o a la base de Olin Robotics, o sencillamente dar un paseo de relajación, lo vale.
Otra razón por la que consideramos el 2021 tan significativo es que en agosto, motivado por mi amigo Juan Machado, abrimos un Patreon, y desde septiembre parte de los gastos fijos como la luz y el internet, se cubren con el Patreon; el resto se divide simbólicamente entre los integrantes de Olin Robotics: Brayam, Gabriel, Jairo y José Olin.
Si el proyecto resuena contigo y crees, como nosotros, que la autonomía es un derecho humano, puedes pasar la voz y difundir el proyecto, y si tu nivel de compromiso es de nivel guerrillero, puedes ser parte de La Resistencia y suscribirte a nuestro Patreon en dónde compartimos contenido exclusivo de nuestro proceso de desarrollo, así como notificaciones anticipadas cuando se actualiza el código o los circuitos de los proyectos, también tendrás acceso anticipado al video bimensual de la prueba del Isiukak, en el que arriesgamos la vida por ustedes.
los días que el invierno pega duro o me pongo ansioso porque el proyecto se rebela más de lo que habíamos contemplado, recuerdo que la resistencia nos respalda, y que no podemos fallarle
Si ya eres parte de la resistencia Gracias. Tu apoyo tiene más impacto del que te imaginas y los días que el invierno pega duro o me pongo ansioso porque el proyecto se rebela más de lo que habíamos contemplado, recuerdo que la resistencia nos respalda, y que no podemos fallarles.
El proyecto Isiukak es de código y hardware abiertos y puedes visitar el repositorio de Github, que incluye piezas 3D, esquemáticos y código
La misión de Olin Robotics es diseñar y construir tecnología de asistencia que permita una vida autónoma para personas con retos físicos. Consideramos que los proyectos Open Source son el mejor medio a largo plazo para desarrollar soluciones que beneficiarán a la comunidad. El proyecto Isiukak es de código y hardware abiertos y puedes visitar el repositorio de Github que incluye piezas 3D, esquemáticos y código. Son nuestros primeros pasos creando proyectos de código abierto, así que tus recomendaciones para que la replicación sea lo más sencilla posible son más que bienvenidas.
Si no habías escuchado hablar de Patreon, puedes revisar el siguiente video en el que platicamos qué es Olin Robotics y qué es Patreon
Hasta la autonomía, siempre.
Esta publicación es posible gracias a nuestros Patreons.